Textile Interfaces » Labs + Final
Lab 0: Soft Circuit
Lab 1: 3 x Digital Switches
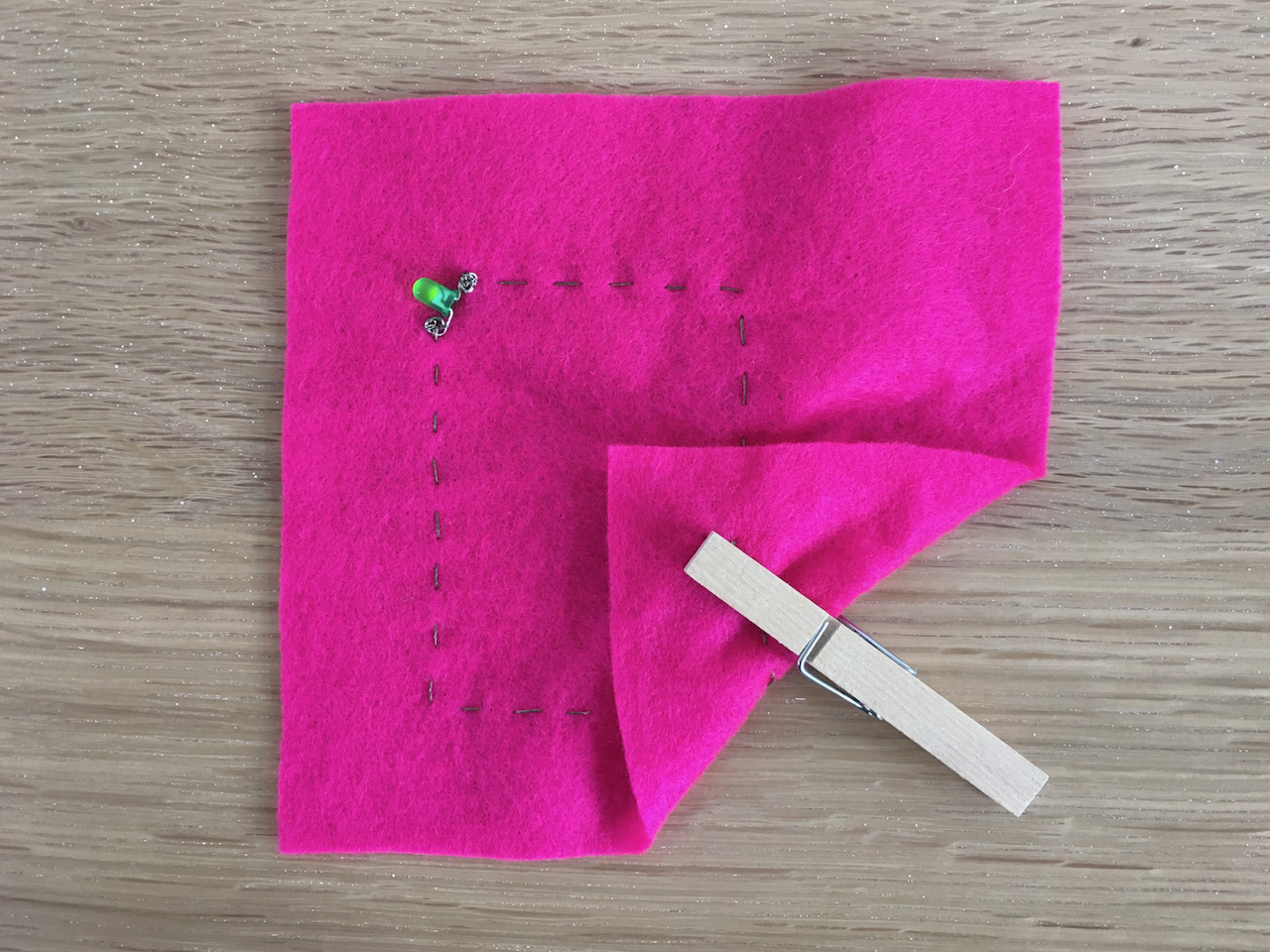
Fold Switch
Bridge Switch
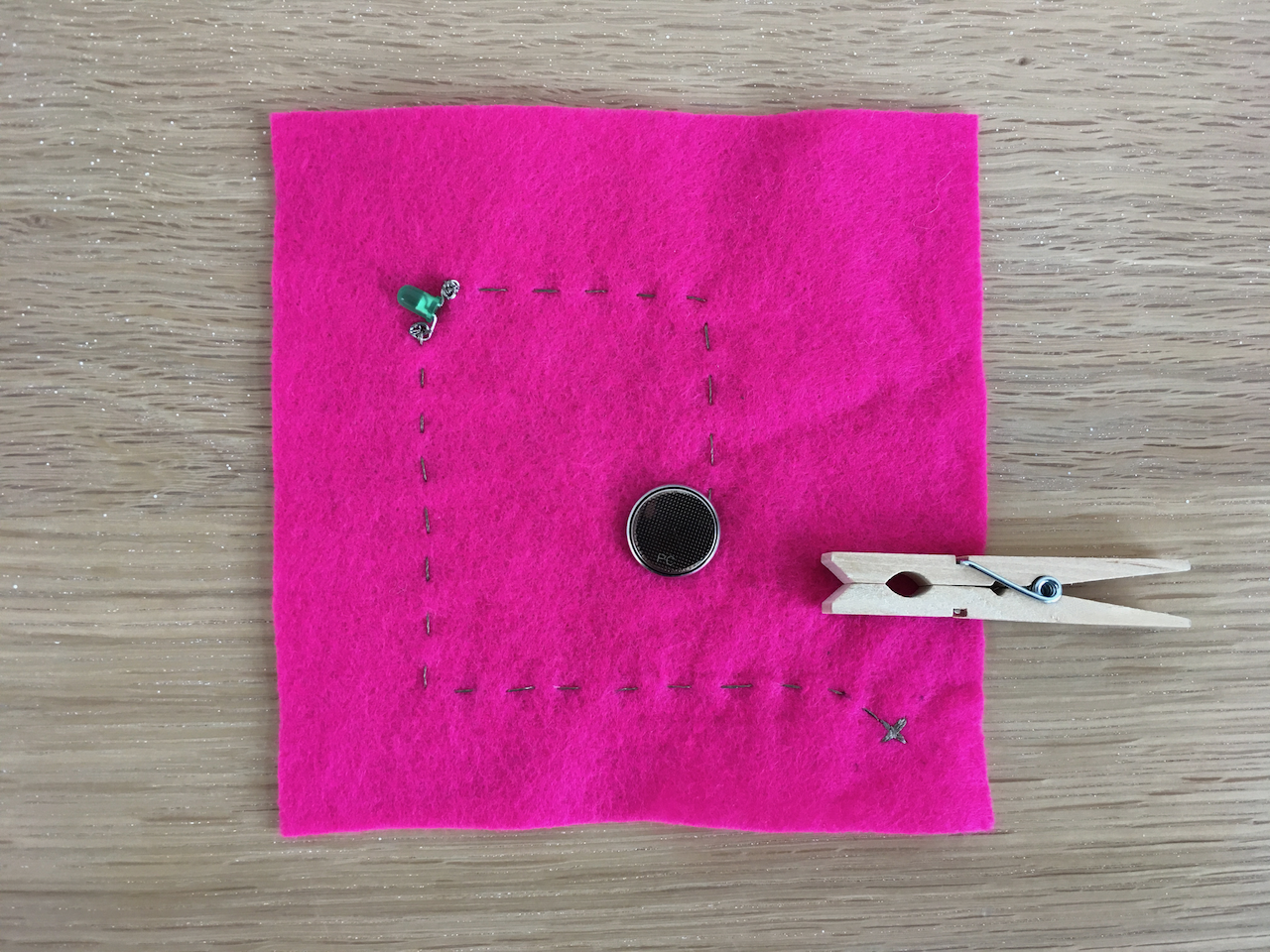
Magnetic Trip Switch
This switch is (intended to be) held closed by embedding a small neodymium magnet between iron-on conductive fabric and felt backing.
There were two unforeseen consequences with this implementation.
First, it turns out the heat – in this case the heat of the iron – is damaging to neodymium magnets. While they retained enough magnetic attraction to hold physical contact, the strength of the attraction was significantly diminished.
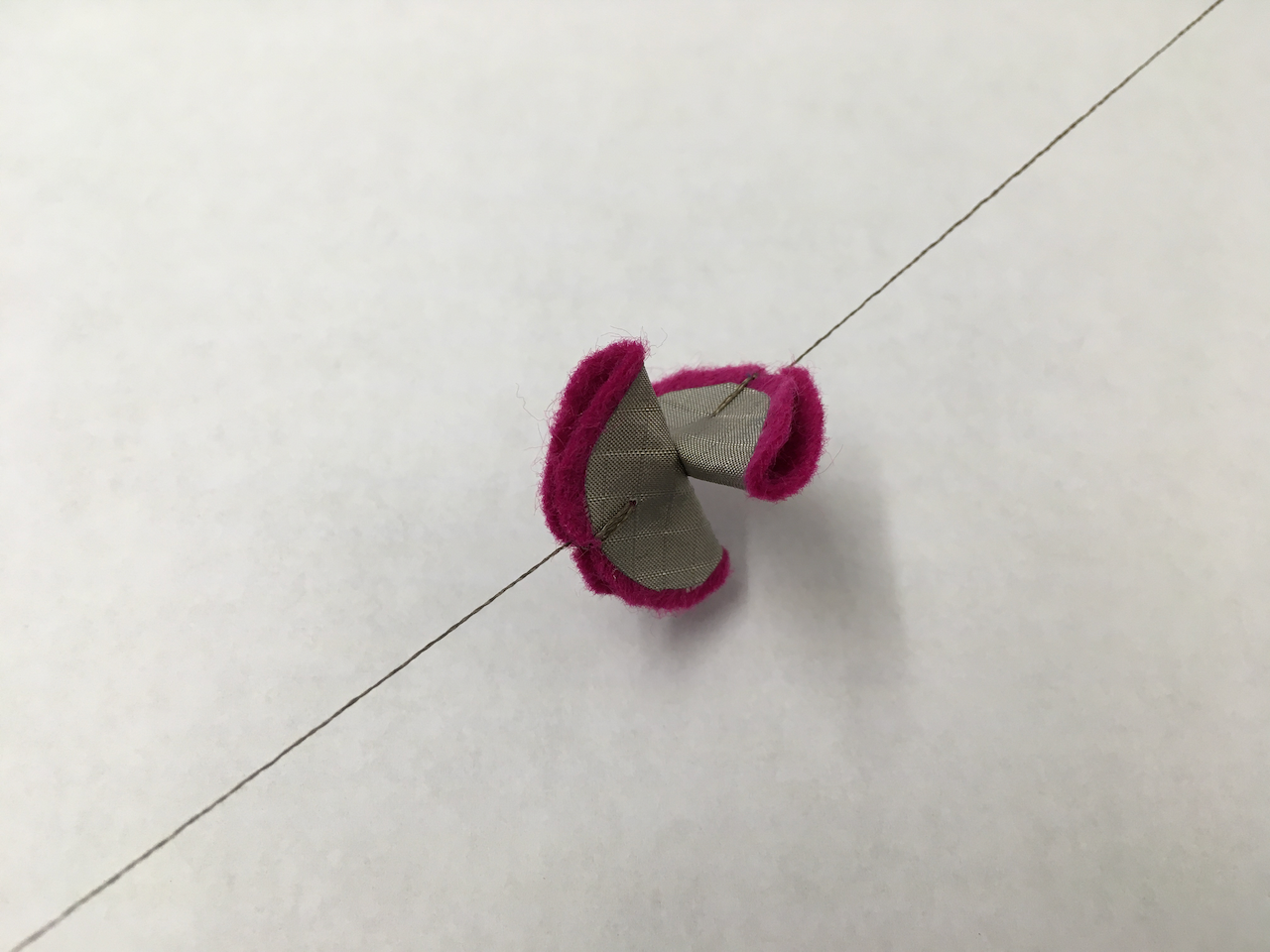
Second, it turns out the fabric we used in class is coated not impregnated with conductive material. While playing with the switch, the coating actually wore away by mechanical abrasion, rendering it useless.

Lab 2: Analog Textile Sensor
Final: Felt Compass Dial
For my final I wanted to keep playing with the little neodymium magnets. It occurred to me they could be used to set position on a dial of some kind, not unlike the detents on a rotary encoder. a metal snap would make a perfect conductive axis of rotation … the most humble of slip rings.
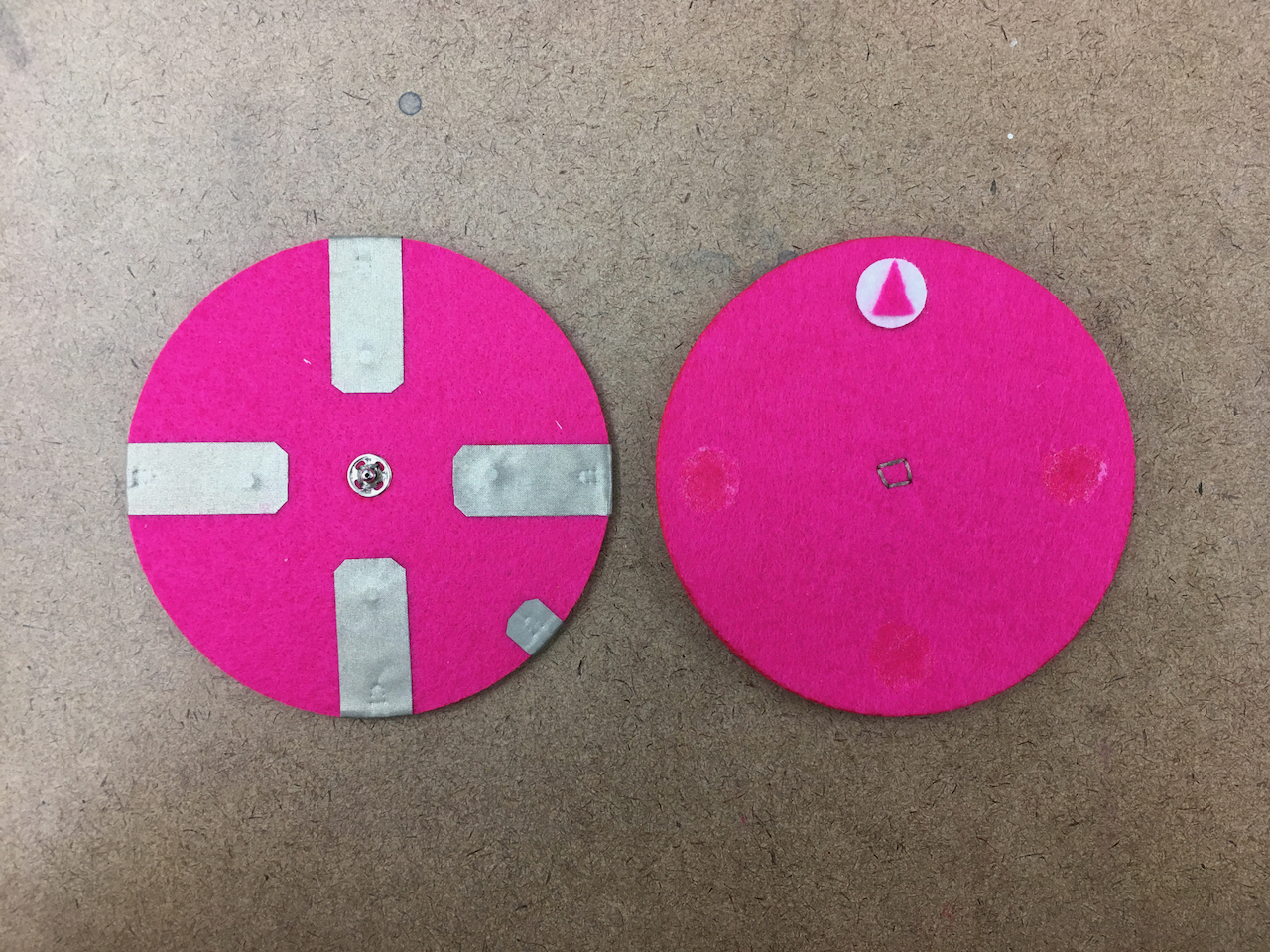
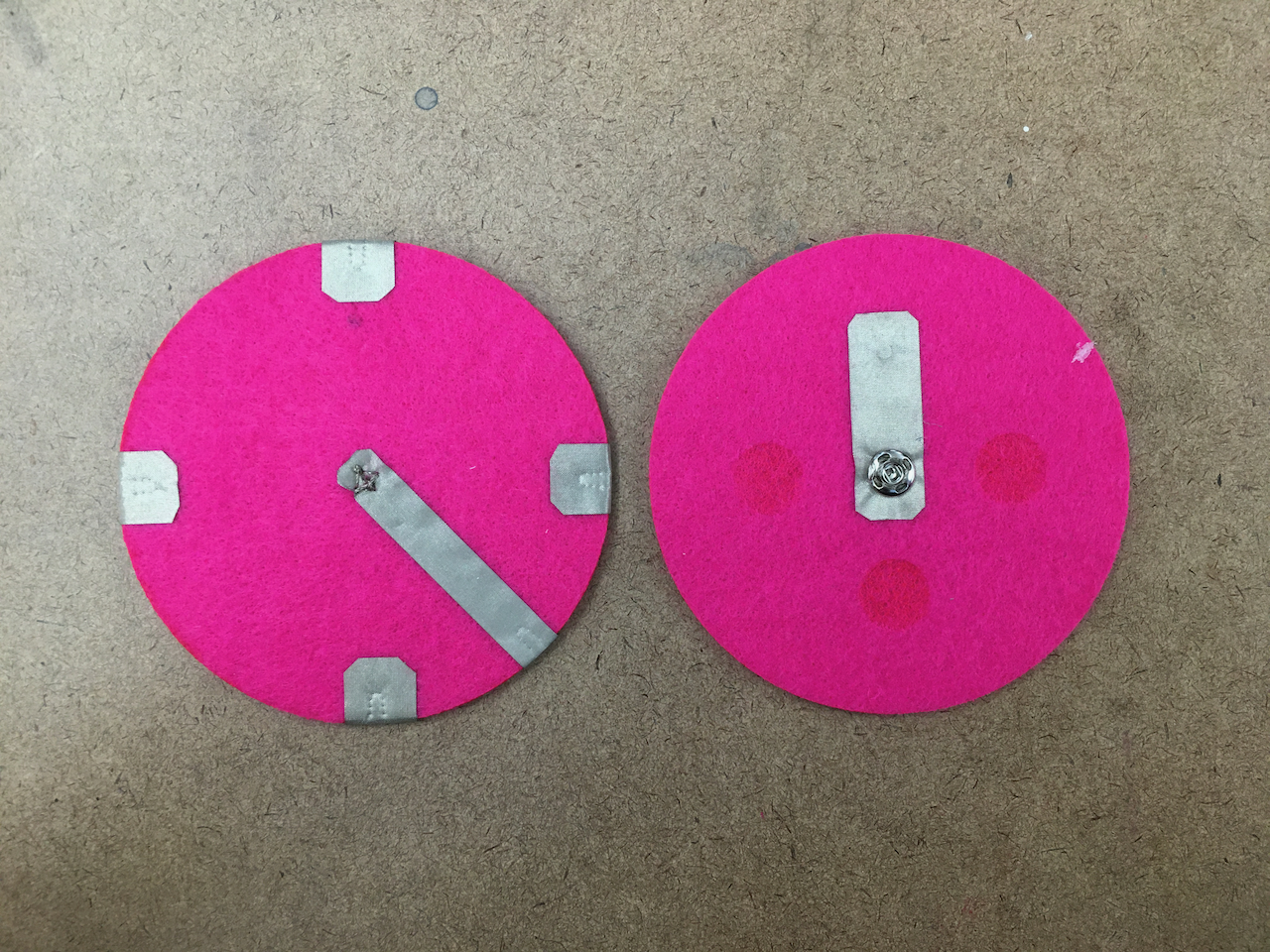
If the volume is high enough you can hear the sound of the two magnets snapping together, pinching the conductive tape between them and ensuring good contact.
Technically, my final doesn’t qualify as a rotary encoder. Were it an encoder, the Arduino would be reading position from one signal. As it stands, what I made is in effect four digital switches in a circular configuration.
I like to think of it as a (text)ile interface for playing text adventures, famous for their use of the four cardinal points as a navigational conceit.